Preprints
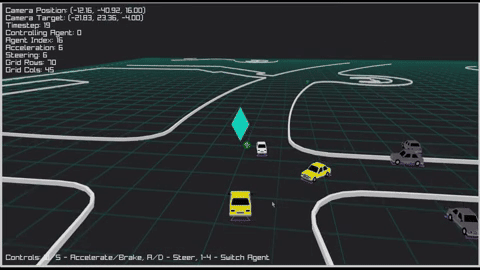
PufferDrive 2.0: A fast and friendly driving simulator for training and evaluating RL agents
Daphne Cornelisse, Spencer Cheng, Pragnay Mandavilli, Julian Hunt, Kevin Joseph, Waël Doulazmi, Valentin Charraut, Aditya Gupta, Joseph Suarez, Eugene Vinitsky
Blog Post, 2025
Publications

Robust Autonomy Emerges from Self-Play
Marco Cusumano-Towner, David Hafner, Alex Hertzberg, Brody Huval, Aleksei Petrenko, Eugene Vinitsky, Erik Wijmans, Taylor Killian, Stuart Bowers, Ozan Sener, Philipp Krähenbühl, Vladlen Koltun
International Conference on Machine Learning (ICML), 2025
GPUDrive: Data-driven, multi-agent driving simulation at 1 million FPS
Saman Kazemkhani, Aarav Pandya, Daphne Cornelisse, Brennan Shacklett, Eugene Vinitsky
International Conference on Learning Representations (ICLR), 2025

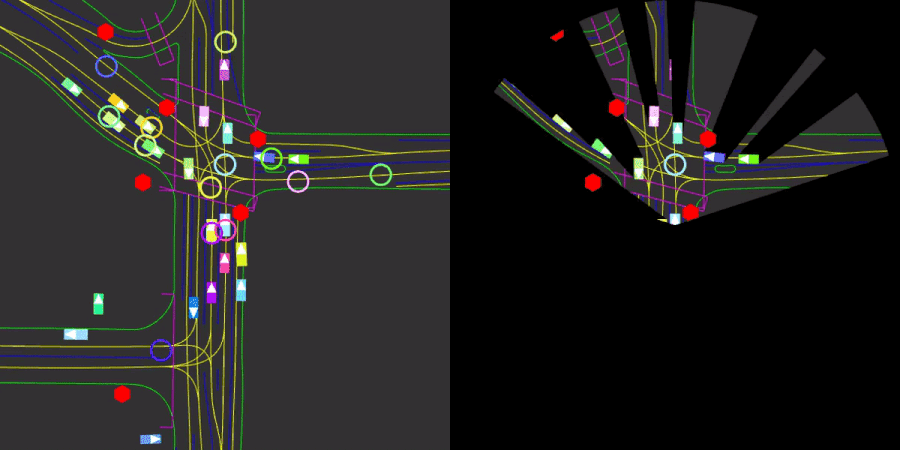
Nocturne: a scalable driving benchmark for bringing multi-agent learning one step closer to the real world
Eugene Vinitsky, Nathan Lichtlé, Xiaomeng Yang, Brandon Amos, Jakob Foerster
NeurIPS, 2022
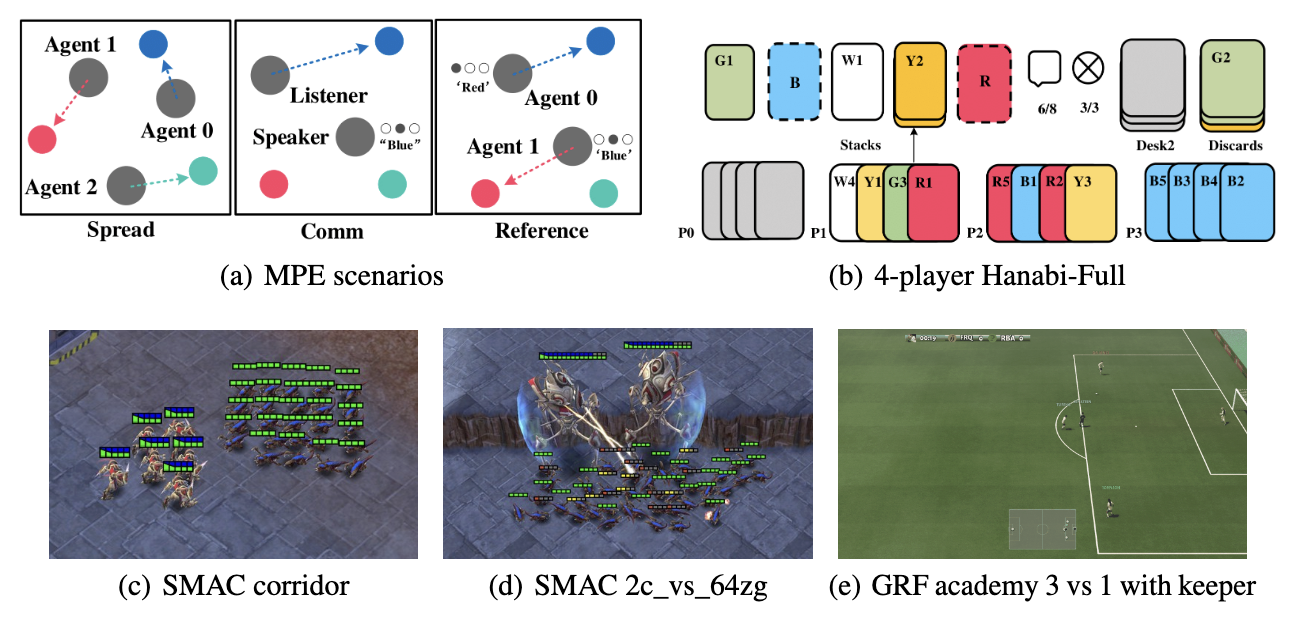
The Surprising Effectiveness of PPO in Cooperative Multi-Agent Games
Chao Yu, Akash Velu, Eugene Vinitsky, Jiaxuan Gao, Yu Wang, Alexandre Bayen, Yi Wu
NeurIPS, 2022
Unified Automatic Control of Vehicular Systems with Reinforcement Learning
Zhongxia Yan, Abdul Rahman Kreidieh, Eugene Vinitsky, Alexandre M. Bayen, Cathy Wu
IEEE Transactions on Automation Science and Engineering, 2022